
یکی از ابزارهای نوین پایش وضعیت و ردیابی خوردگی در سازههای صنعتی آکوستیک امیشن (AE) میباشد. این ابزار، سازهها و تجهیزات صنعتی را حین سرویس تحت پایش قرار میدهد و عیوب فعال آنها (منجمله نشتی و خوردگی) را شناسایی و مکانیابی مینماید. برای مثال، پدیدههای مختلفی میتوانند بعنوان منابع ایجاد انرژی و سیگنال AE در پروسه خوردگی عمل نمایند که عبارتند از :
- تشکیل و رشد ترکهای خوردگی تنشی
- تردی هیدروژنی
- عکسالعمل کاتدیک و آندیک
- تشکیل گاز هیدروژن
- شکست فیلم یا محصولات خوردگی
ارتباط مابین خوردگی و سیگنال آکوستیک امیشن
پروسهی خوردگی یک انتقال یون مابین آند و کاتد است. در قطب آند عملیات اکسیداسیون اتفاق میافتد. در قطب کاتد (منفی) عملیات احیا رویداده و حباب هیدروژن ایجاد میشود. یکی از مخرب ترین اَشکال خوردگی، خوردگی حفره ای میباشد که در آن شدت خوردگی توسط 2 عامل اندازه گیری میشود :
- ماگزیمم عمق حفره
- فاکتور حفرهای (فاکتور حفرهای نرخ عمق در عمیق ترین حفره است).
برای فهم رابطه بین ردیابی خوردگی حفرهای با آکوستیک امیشن ابتدا بایستی ماهیت خوردگی حفرهای را شناسایی کرد. سه مرحله تشکیل یک خوردگی حفرهای عبارتند از :
- جوانه زنی
- رشد اولیه حفرهی ناپایدار
- رشد و تشکیل حفرهی پایدار
بر اساس ماهیت خوردگی، تعداد شمارشهای آکوستیک امیشن میتواند با نرخ خوردگی در شرایط متفاوت رابطه برقرار نماید. به طور کلی، سه منبع تولید سیگنالهای آکوستیک امیشن در مطالعه مکانیزم خوردگی حفرهای مشاهده شده است :
- فعالیت حباب ها
- شکست فیلم ایجاد شده
- رشد و گسترش حفره
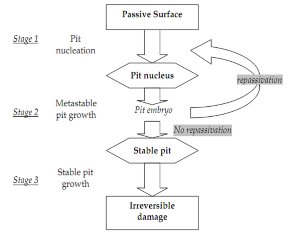
مراحل تشکیل خوردگی حفره ای
فرکانس ترکیدگی حبابهای هیدروژن از رابطه تئوری لیتون محاسبه میگردد؛
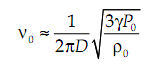
که در این رابطه D قطر حباب ها میباشد (طبق نتایج بزرگترین سایز حبابها 0/9 میلیمتر است). چگالی سیال 1000 کیلوگرم بر متر مکعب است و فرض میشود که حباب از گاز ایدهآل با ضریب ویژه حرارتی 1/4 تشکیل شدهباشد. همچنین فرض میگردد که سیال تقریبا غیر قابل تراکم و با فشار استاتیکی Kg/m.s2 3/110×107 باشد. میزان فرکانس قطع طبق این رابطه 125KHz محاسبه میگردد. این نشان میدهد که فعالیت آکوستیکی با فرکانس بالاتر از 125KHz ناشی از تحرکات حبابها است.
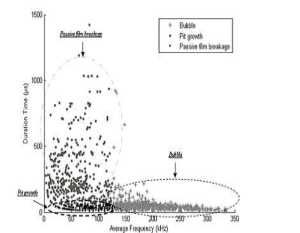
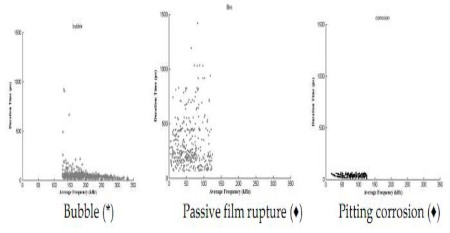
فرکانس میانگین منابع سه گانه AE در حوزه زمان
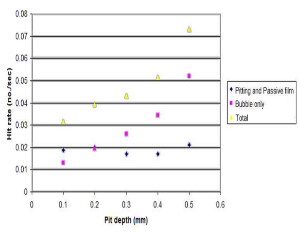
رابطه بین عمق خوردگی حفره ای و نرخ اتفاقات AE
نویزهای حین آزمون آکوستیک امیشن :
اما در حین پایش وضعیت کف مخازن نگهداری، سیگنالهای نویز در اثر فاکتورهای محیطی ایجاد میگردد که میتواند بطور جدی بر روی دقت تفسیر نتایج اثر بگذارد. روشهای متنوعی برای حل این مسئله وجود دارد، از قبیل:
- استفاده از فیلترهای نرم افزاری و سخت افزاری جهت فیلتر نمودن پهنای فرکانسی خاص جهت حذف نویزها
- استفاده از الگوهایی از قبیل Wavelet و هوش عصبی جهت حذف نویزها در مدهای مختلف
- دور نگه داشتن سیستم AE از منابع ایجاد تداخل الکترونیکی و لرزشی
به هرحال محیط آکوستیکی اطراف مخزن بسیار پیچیده است و بصورت جدی از تداخل با سقف مخزن تأثیر میپذیرد.
روشهای اشاره شده در بالا قابلیت حذف نویزهای درون مخزن را ندارند.
همچنین بخوانید : بررسی نویزها در تست آکوستیک امیشن |
نویزهای درون مخزن (بر اساس نوع مخزن) عبارتند از :
- مخازن با سقف ثابت: گاز موجود در فضای بین سقف مخزن و سطح سیال در اثر برخورد با دیواره سرد چگالش یافته و بصورت قطراتی وارد سیال میگردد که سیگنال ناشی از آن مستقیما داخل سیال منتشر گردیده که بسیار شبیه به سیگنالهای خوردگی کف مخزن است.
- مخازن با سقف شناور: در این مخازن سقف مخزن با سطح سیال در ارتباط است و مشکلی از بابت سقوط قطرات وجود ندارد. ولی سقف مخزن نسبت به ایجاد خوردگی در نواحی جوشکاری شده در تماس با سطح سیال حساس است که سیگنالهای خوردگی از طریق سیال منتقل شده و ایجاد خطا میکند.
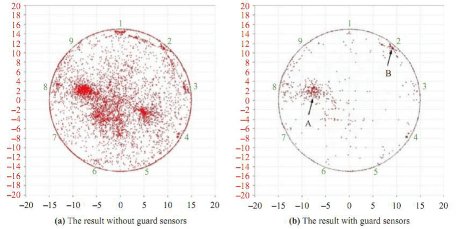
حل این مسئله با استفاده از گارد سنسور است.
با استفاده از گارد سنسور میتوان سیگنالهای نویز که از کف مخزن نباشد را پوششدهی نمود. با توجه به ترتیب قرارگیری سنسورهای اصلی و گارد سنسور میتوان جهت منابع سیگنالهای AE را تشخیص داد. سنسورها را میتوان در همان راستای سنسورهای اصلی (دقیقا در همان موقعیت محیطی با ارتفاع بالاتر) و یا با موقعیت محیطی متفاوت قرار داد ولی تعداد گارد سنسورها نمیتواند از 3 کمتر باشد.
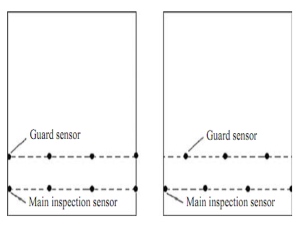
سنسورهای مورد استفاده برای دادهبرداری AE و گارد
زمان قفل سنسورهای اصلی،Δ𝑡 ، با استفاده از فاصله بین سنسورها d (فاصله بین سنسورهای اصلی و گارد سنسورها ) و سرعت انتقال موج در درون سیال v تعریف میگردد: Δ𝑡 = d/v
اگر فاصله بین دو ردیف سنسور زیاد باشد، باعث افزایش Δ𝑡 شده و اگر خیلی کم باشد، زمان قفل کاهشیافته و میزان پوششدهی نویزها کمتر میگردد که بازدهی را کم میکند. بهترین و مؤثرترین فاصله بین سنسورها 2 تا 4 متر است.
نویز ناشی از باد
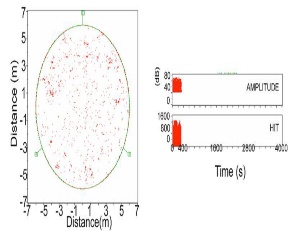
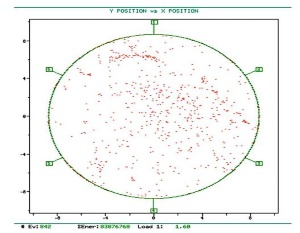
باد با سرعت بالای 4 متر بر ثانیه میتواند بر اطلاعات دریافتشده اثر بگذارد. مکانیابی نویز ناشی از باد با سرعت 10 متر بر ثانیه در شکل زیر نمایش داده شدهاست. مکانیابی بصورت یک طرح دایرهای و گسترشیافته از مرکز به سمت کناره مخزن نشان دادهشدهاست. در بعضی مواقع میتوان توسط حسگرهایی سرعت باد را تخمین زد ولی این روش خیلی مؤثر نمیباشد زیرا سرعت باد در قسمتهای مختلف مخزن متفاوت است. همچنین وقتی سرعت باد زیاد است امکان فیلتر نمودن نتایج پس از آزمون نیز نمیباشد. ولی در مواقعی که باد بصورت ناگهانی باشد میتوان با منطبق نمودن زمان باد با دیتاهای دریافتی، نتایج را فیلتر نمود. در شکل زیر تغییرات انجامشده در دادههای دریافتشده در حین باد مشاهده میشود.
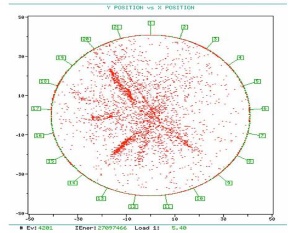
مکان یابی نویز باد
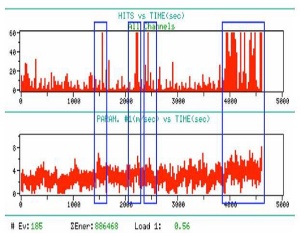
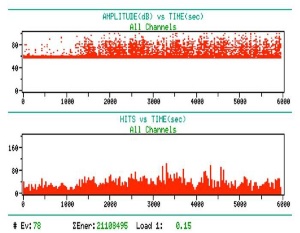
رابطه بین داده های AE و (بالا) تغییرات سرعت باد (پایین)
نویز ناشی از باران
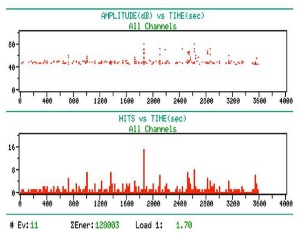
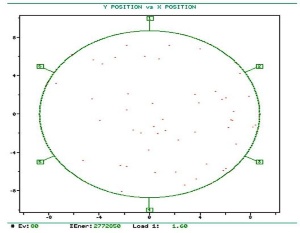
نویز ناشی از باران معمولا سیگنالهایی با دامنه بیشتر از dB 80 ایجاد میکند. مکان اتفاقات ناشی از آب در یک محیط وسیع و بطور تقریبا یکسان پراکنده میگردد. نه تنها در حین بارندگی بلکه در مخازن بزرگ تا 24 ساعت پس از بارندگی نیز اثرات آن وجود خواهد داشت.
نویز ناشی از باران در یک مخزن نمونه
نویز ناشی از لرزش لوله ها در اثر فعالیت پمپ ها
حتما بایستی جهت انجام آزمون کلیه پمپ ها و موتورهای متصل به مخزن خارج از سرویس باشد چون فیلتر نمودن نویز بسیار دشوار است.
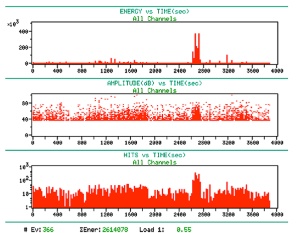
دیتاهای AE دریافتی در حین فعالیت پمپ (بالا) و پس از فیلتر نمودن (پایین)
نویز ناشی از حرکت پرندگان بر روی مخزن
حرکت پرنده سبب افزایش ناگهانی در نرخ دادههای دریافتی میگردد. بنابراین با بررسی و مشخص نمودن زمان حرکت پرندگان، دیتاها را میتوان پس از آزمون فیلتر نمود.
نویز ناشی از حرکت پرندگان بر روی مخزن نمونه
نویز ناشی از سقوط قطرات چگالش سیال
با استفاده از دو ردیف سنسور میتوان آن را فیلتر نمود.
نویز ناشی از سقوط قطرات ناشی از چگالش سیال (سمت راست) و فیلترشده (سمت چپ)
نویزهای پریودیک
در مخازن با سقف گنبدی شکل جهت ایجاد تعادل و ثابت نگهداشتن فشار درون مخزن با جو نیتروژن بصورت دورهای تزریق میگردد که سبب ایجاد نویز پریودیک میگردد.
نویز پریودیک در یک مخزن نمونه
مطالعه موردی – نتایج آزمون آکوستیک امیشن بر روی مخزن نگهداری

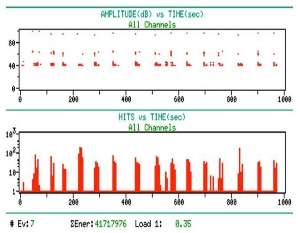
Event و Hit تعداد
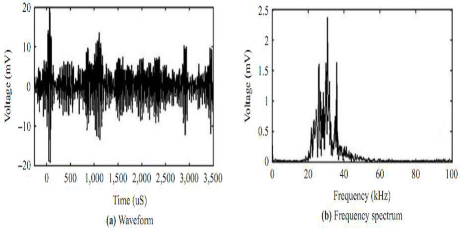
شکل موج و طیف فرکانسی در منطقه A
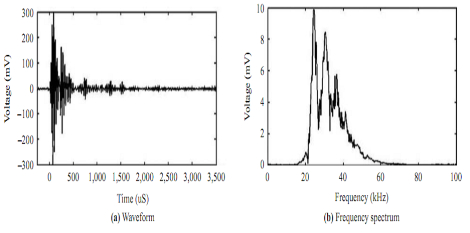
شکل موج و طیف فرکانسی در منطقه B
در ناحیه A ماگزیمم دامنه در حدود 20mV است و فرکانس میانگین 20-40KHz دارد که ناشی از خوردگی واقعی است. در ناحیه B ماگزیمم دامنه 300mV و فرکانس میانگین 60-20 کیلوهرتز دارد. به نظر میرسد که در این ناحیه پدیده رشد ترک یا جدایش لایهای در ورقههای ضد خوردگی اتفاق افتادهاست. برای بررسی صحت نتایج، پس از تخلیه این نقاط مورد مطالعه قرار گرفت که صحت نتایج را تأیید مینماید.

تصاویر خوردگی در کف مخزن
![]()